Automated Jobsite Intrusion Deterrence Using LiDAR and Passive Infrared Sensing
Construction sites face costly theft; this research develops a low-cost, mobile, network- independent LiDAR-based autonomous system to detect and deter unauthorized intrusions.
Investigators
Construction sites are prone to intrusion due to their openness, frequent periods of low activity and the curiosity they naturally attract. Traditional security approaches offer limited adaptability and often fail to prevent unauthorized access. More advanced measures, including security cameras, exist but typically require manual monitoring, frequent repositioning as a project evolves, and reliable network coverage—conditions that many construction sites cannot guarantee. As a result, job site security research remains underdeveloped, and there is a clear need for more flexible, cost-effective, and autonomous solutions.
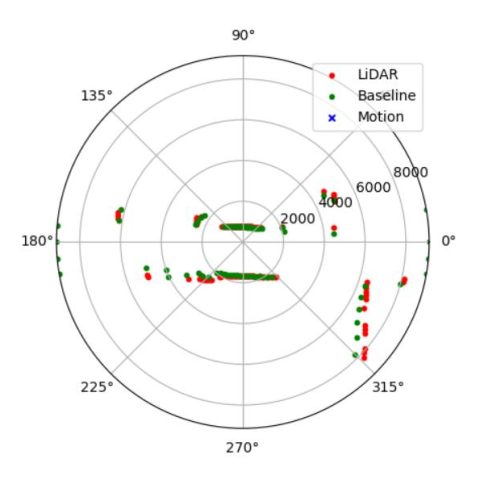
This research addresses that gap by developing and evaluating a novel intrusion detection and deterrence system built around an inexpensive, 2D hobby-grade LiDAR sensor commonly used in robotics. Unlike traditional surveillance, the system leverages the LiDAR’s spatial measurement capabilities to detect movement within predefined zones and trigger deterrence responses without relying on human oversight. Its mobility is key: mounted on a tripod and requiring only a standard power source, the device can be easily relocated as materials, equipment, and risk areas shift throughout the construction process.
Additionally, the system operates independently of wireless networking, making it highly suitable for environments where Wi‑Fi is unreliable, temporary, or nonexistent. Experimental testing evaluated detection reliability, false alarm rates, and environmental performance in both indoor and outdoor settings. Results demonstrate that combining LiDAR and PIR sensing offers a practical and affordable solution for autonomous construction site security.


See more in:
CCIC Awardees
Related people:
Eric Wetzel,
Kenneth Sands